マイクロマウス2021に参加してきました
遅ればせながら、2021年度のマイクロマウス全日本大会に参加してきた記録を残しておきます。
結果
エントリーしたのはマイクロマウスのファイナル。
5回トライしましたが、残念ながら完走できませんでした。
前日の試走会の時点でまともに走れず本番当日も諦め気味だったんですが、案の定の結果です。
原因はおそらく壁センサが会場の明るさに耐えられなかったことと、迷路の段差に弱かったことと思われます (後述)。
出走機体
新作、ぷちぷち3号です。

リアル大会を開催すると聞いて去年の11月から急遽作り始めました。
コンセプトは「前作の幅狭マウスにサイクロン吸着を乗せる」です。
以下、いくつかトピックを書いてみます。
壁センサ
リタイアの原因その1。
前作から地味に変更していて、1つの LED 駆動回路で4つの LED を時分割駆動したり、ソフトの介在なしにマイコンペリフェラルのみで LED 点灯から AD、DMA まで出来るようにしたり、などが変更点です。
で、問題の受光回路。4つの PD の出力を 1つのトランスインピーダンス回路で増幅しているのは前作と同じなのですが、諸事情により DC カットコンデンサを外しています。
4つの PD の電流が全部アンプに流れてくるので飽和しやすい回路になっています。テストして大丈夫だと思ったんですがどうやら駄目だったようです…
会場でセンサ値を見る限りは飽和している様子はなく今一納得し切れていないのですが、陰を作ったりサンバイザーを付けたりすると多少マシになったので、やっぱりそういうことなのかなあと。
段差対策
リタイアの原因その2。
これは完全に油断してたんですが、今作めちゃくちゃ段差に弱かったようです…
ロータリーエンコーダが紙製の手作り光学式で、A相しかありません。ハードは前作と一緒なのですが、アルゴリズムを変えたのが裏目に…
これが対策後。
— du_chin (@du_chin) March 26, 2022
散々悩んだけど、タイヤの回転数がおかしいときは単に無視するのが一番うまく行った。
変なエンコーダー使うと変な小細工が必要になる。 pic.twitter.com/0Lw6yGfuRl
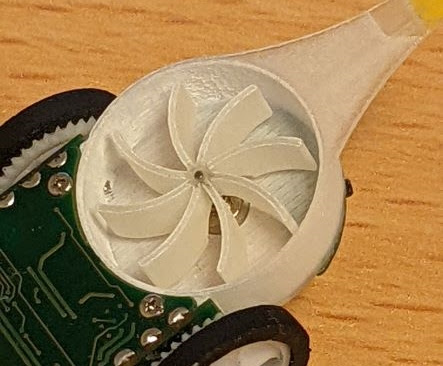
サイクロン吸着
この機構の呼び方はサイクロン吸着でいいのだろうか?よく分からないのでk峰さんが youtube で使ってた呼び方で行きます。
従来の吸引と違ってスカートが要らないということで、小型軽量でモータートルクが最小限しかないマシンとの相性が良いだろうということで採用しました。
また底面の気圧が低い中でファンを回すのでモーターの負荷が小さい→低電流というのもメリットだと思います。
悩ましいのが、原理をよく理解してないのでどんな形状がいいのか全く分からんということ。3Dプリンタでとにかく作っては試してを繰り返しました (本番とは精度が違うのであくまで雰囲気だけの相対比較)。
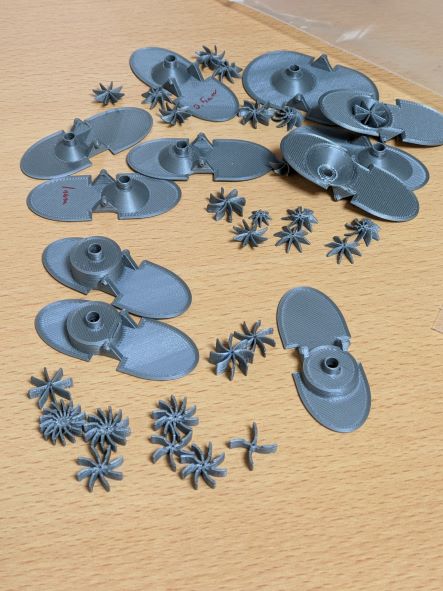
で、試した中ではどうやらこの形が良いようだということで、断面が矩形でいい感じにカーブさせた形状を採用しました。
ガバガバ測定ですが、これで車重の80%弱ぐらいは貼り付けているようです。自宅迷路での最短走行では効果は一応あるように思いました。
で、スカートなしの機構で実力としてはまあこんなもんだろうと思っていたのですが、会場にはもっとずっとすごいマシンがいました…。確かにそっちの作り方のほうが良さそう…(会場で聞いた)。
まとめ
ということで結構頑張って新作を作ったんですが、今回は残念な結果になりました。
今度こそ、大会後のモチベーションをこのまま保って次の大会に臨みたいところです。
と言いつつすでに何もせず1か月が経過…
0 件のコメント:
コメントを投稿